ubuntu 21.10(arm64) + Raspberry Pi 4環境でPCA9685を用いてアナログPWMサーボモータを動かす
December 25, 2021
Categories: ubuntu raspberrypi hardware
PCA9685
Raspberry Pi 4本体にはPWMに対応したGPIOポートが4つしかないので、 このままだと最大でも4つのモータしか同時に動かせない。 そこで、I2C接続で16チャンネルのPWMサーボを制御できる、 マルチチャンネルPWMサーボドライバーボード(PCA9685)を導入してみる。
動作テストに用いるサーボモータは、 Amazon.jpで買えるだいぶお安い中華サーボモータを試しに買ってみた。
1
2
% sudo apt install i2c-tools
% pip3 install adafruit-pca9685
/boot/firmware/config.txt
ブートローダの設定(config.txt)に項目が存在しない場合、下記を追記する。 (ubuntu 21.10 arm64ではデフォルトで有効)
1
dtparam=i2c_arm=on
Raspberry Pi OSの場合は、これに加えi2c-devカーネルモジュールを 読み込むよう設定せよとの情報があったものの、ubuntu 21.10の標準カーネルの場合は そもそもカーネルモジュールファイルが存在しない (CONFIG_I2C_CHARDEV=yでカーネルに組み込まれている)ようだったので無視する。
うまく設定できていれば、/dev/i2c-1が存在するはず。
1
2
% ls -l /dev/i2c-1
crw-rw---- 1 root i2c 89, 1 Dec 17 10:55 /dev/i2c-1
i2cグループに所属していないとアクセスが拒否され操作できないので、あらかじめ確認しておく。
(もし参加していない場合はsudo usermod -A -G i2c ユーザ名などで参加できる)
1
2
% id
uid=10000(gloria) gid=10000(trainers) groups=10000(trainers),20(dialout),44(video),124(i2c)
接続
ごくふつうのi2c接続と基本は同じだが、サーボの駆動に外部電源を用いる必要がある。 (Raspbery Piの5Vに繋いでも一応動くようだが、Raspberry Piが壊れる可能性があるためやらない方がよい) 今回はそこらへんに転がっていたUSB-ACアダプタから給電することにした。
| PCA9685側 | Raspberry Pi側 | 外部電源側 |
|---|---|---|
| GND | GND | GND |
| OE | ||
| SCL | SCL | |
| SDA | SDA | |
| VCC | 5V power | |
| V+ | 5V power |
(画像を作る時間がなかった)
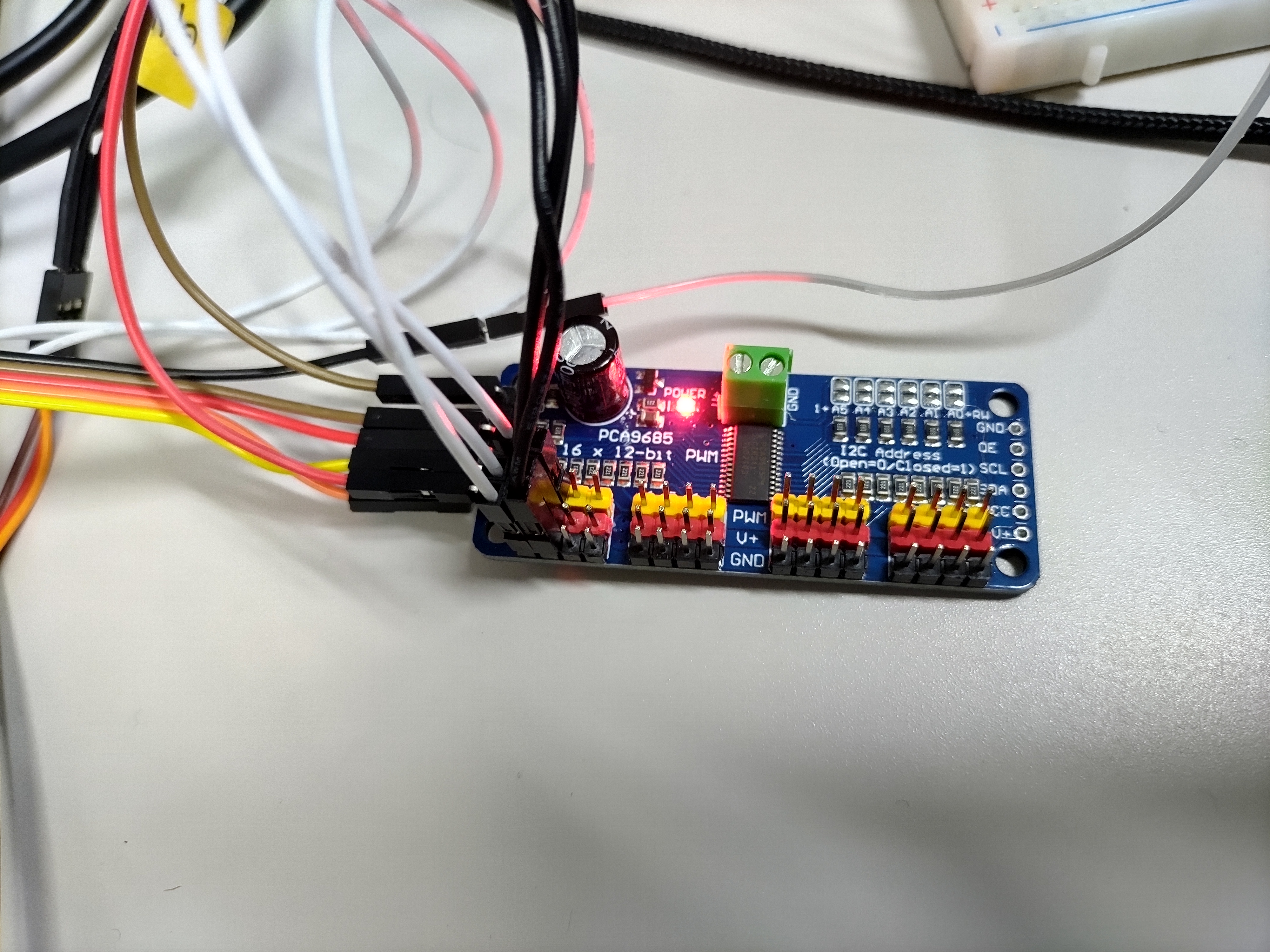
V+は電源供給用ポートが別途用意されていた(緑色のポート)のだが、そちらに給電してもなぜか全く反応しなかったので、 左側のポートに接続した。
制御用プログラムのソース
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
#!/usr/bin/python3
import Adafruit_PCA9685
def convert_deg(self, deg, freq=50):
step = 4096
max_pulse = 2.5
min_pulse = 0.5
center_pulse = (max_pulse - min_pulse) / 2 + min_pulse
one_pulse = round((max_pulse - min_pulse) / 180, 2)
deg_pulse = center_pulse + deg * one_pulse
deg_num = int(deg_pulse / (1.0 / freq * 1000 / step))
return deg_num
servo_port = 0
pwm = Adafruit_PCA9685.PCA9685()
pwm.set_pwm_freq(50)
pwm.set_pwm(servo_port, 0, convert_deg(45))